July 2016 - May 2017
Project Supervisor: Prof. Shantanu Bhattacharya
Aerial and ground robots together form a ‘symbiotic’ relationship in which they help overcome each other’s limitations and leverage their capabilities. Although research has made steady progress over the years on this, most of the work is limited to laboratory settings and is not sufficient for real-world challenges.
In this project, we are building a multi-robot autonomous system that is capable of performing operations such as bomb- disposal. Considering the severity of the challenges, we are presently focusing our problem for indoor environments.
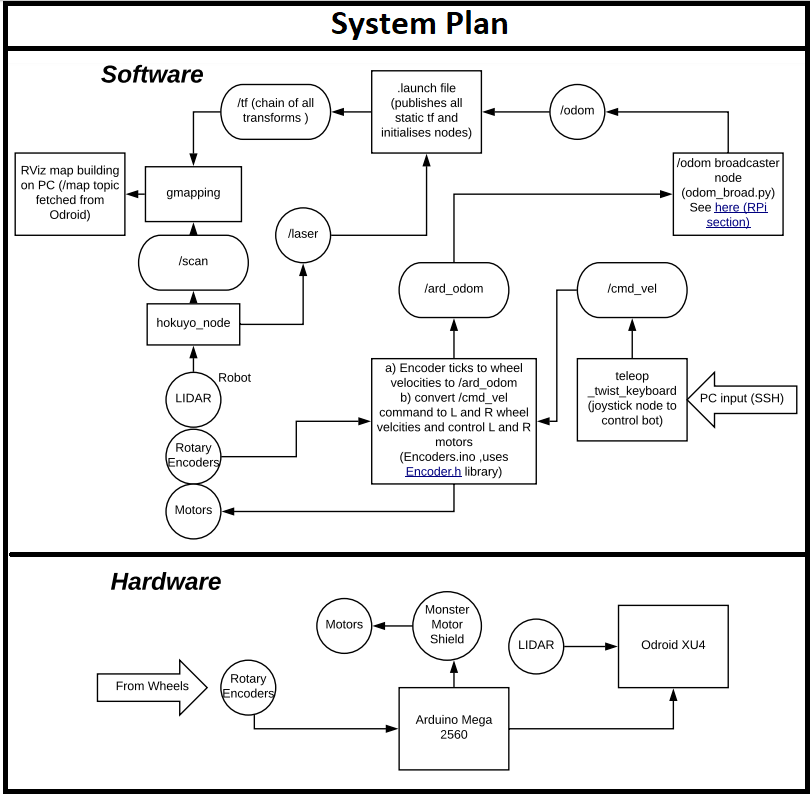
My work primarily involves mechanical design and fabrication of bots and electro-mechanical system integration of robots by configuring microcontrollers, actuators, and sensors such as LIDAR, Kinect, rotary encoders, etc.